Nicklas Hansen, Hao Su︎︎✝︎, Xiaolong Wang✝︎.
Learning Massively Multitask World Models for Continuous Control.
International Conference on Learning Representations (ICLR), 2026.

An-Chieh Cheng, Yang Fu, Yukang Chen, Zhijian Liu, Xiaolong Li, Subhashree Radhakrishnan, Song Han, Yao Lu, Jan Kautz, Pavlo Molchanov, Hongxu Yin✝︎, Xiaolong Wang✝︎, Sifei Liu✝︎.
3D Aware Region Prompted Vision Language Model.
International Conference on Learning Representations (ICLR), 2026.

Zixuan Chen*, Mazeyu Ji*, Xuxin Cheng, Xuanbin Peng, Xue Bin Peng†, Xiaolong Wang†.
GMT: General Motion Tracking for Humanoid Whole-Body Control.
International Conference on Intelligent Robots and Systems (IROS), 2026.
Ruihan Yang*, Qinxi Yu*, Yecheng Wu, Rui Yan, Borui Li, An-Chieh Cheng, Xueyan Zou, Yunhao Fang, Xuxin Cheng, Ri-Zhao Qiu, Hongxu Yin, Sifei Liu, Song Han, Yao Lu, Xiaolong Wang.
EgoVLA: Learning Vision-Language-Action Models from Egocentric Human Videos.
International Conference on Intelligent Robots and Systems (IROS), 2026.
Ri-Zhao Qiu*, Shiqi Yang*, Xuxin Cheng*, Chaitanya Chawla, Jialong Li, Tairan He, Ge Yan, David J. Yoon, Ryan Hoque, Lars Paulsen, Ge Yang, Jian Zhang, Sha Yi, Guanya Shi, Xiaolong Wang.
Humanoid Policy ~ Human Policy.
Conference on Robot Learning (CoRL), 2025.
Sha Yi*, Xueqian Bai*, Adabhav Singh, Jianglong Ye, Michael T Tolley, Xiaolong Wang.
Co-Design of Soft Gripper with Neural Physics.
Conference on Robot Learning (CoRL), 2025.

Ge Yan, Jiyue Zhu*, Yuquan Deng*, Shiqi Yang, Ri-Zhao Qiu, Xuxin Cheng, Marius Memmel, Ranjay Krishna†, Ankit Goyal†, Xiaolong Wang†, Dieter Fox†.
Maniflow: A general robot manipulation policy via consistency flow training.
Conference on Robot Learning (CoRL), 2025.
Binghao Huang, Jie Xu, Iretiayo Akinola, Wei Yang, Balakumar Sundaralingam, Rowland O'Flaherty, Dieter Fox, Xiaolong Wang, Arsalan Mousavian, Yu-Wei Chao, Yunzhu Li.
VT-Refine: Learning Bimanual Assembly with Visuo-Tactile Feedback via Simulation Fine-Tuning.
Conference on Robot Learning (CoRL), 2025.
Runyu Ding*, Yuzhe Qin*, Jiyue Zhu*, Chengzhe Jia, Shiqi Yang, Ruihan Yang, Xiaojuan Qi, Xiaolong Wang.
Bunny-VisionPro: Real-Time Bimanual Dexterous Teleoperation for Imitation Learning.
International Conference on Intelligent Robots and Systems (IROS), 2025.

Ri-Zhao Qiu, Yafei Hu, Ge Yang, Yuchen Song, Yang Fu, Jianglong Ye, Jiteng Mu, Ruihan Yang, Nikolay Atanasov, Sebastian Scherer, Xiaolong Wang.
Learning Generalizable Feature Fields for Mobile Manipulation.
International Conference on Intelligent Robots and Systems (IROS), 2025.
Ge Yan*, Yueh-Hua Wu*, Xiaolong Wang.
DNAct: Diffusion Guided Multi-Task 3D Policy Learning.
International Conference on Intelligent Robots and Systems (IROS), 2025.
Qi Wu, Zipeng Fu, Xuxin Cheng, Xiaolong Wang, Chelsea Finn.
Helpful DoggyBot: Open-World Object Fetching using Legged Robots and Vision-Language Models.
International Conference on Intelligent Robots and Systems (IROS), 2025.
Jianglong Ye* , Keyi Wang*, Chengjing Yuan, Ruihan Yang, Yiquan Li, Jiyue Zhu, Yuzhe Qin, Xueyan Zou, and Xiaolong Wang.
Dex1B: Learning with 1B Demonstrations for Dexterous Manipulation.
Robotics: Science and Systems (RSS), 2025.
Jialong Li, Xuxin Cheng, Tianshu Huang, Shiqi Yang, Ri-Zhao Qiu, Xiaolong Wang.
AMO: Adaptive Motion Optimization for Hyper-Dexterous Humanoid Whole-Body Control.
Robotics: Science and Systems (RSS), 2025.
An-Chieh Cheng*, Yandong Ji*, Zhaojing Yang*, Zaitian Gongye, Xueyan Zou, Jan Kautz, Erdem Bıyık, Hongxu Yin, Sifei Liu, Xiaolong Wang.
NaVILA: Legged Robot Vision-Language-Action Model for Navigation.
Robotics: Science and Systems (RSS), 2025.
Chenhao Lu*, Xuxin Cheng*, Jialong Li*, Shiqi Yang, Mazeyu Ji, Chengjing Yuan, Ge Yang, Sha Yi, Xiaolong Wang.
Mobile-TeleVision: Predictive Motion Priors for Humanoid Whole-Body Control.
International Conference on Robotics and Automation (ICRA), 2025.
Ri-Zhao Qiu*, Yuchen Song*, Xuanbin Peng*, Sai Aneesh Suryadevara, Ge Yang, Minghuan Liu, Mazeyu Ji, Chengzhe Jia, Ruihan Yang, Xueyan Zou, Xiaolong Wang.
WildLMa: Long Horizon Loco-Manipulation in the Wild.
International Conference on Robotics and Automation (ICRA), 2025.
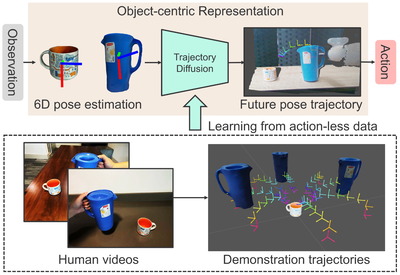
Cheng-Chun Hsu, Bowen Wen, Jie Xu, Yashraj Narang, Xiaolong Wang, Yuke Zhu, Joydeep Biswas, Stan Birchfield.
SPOT: SE (3) Pose Trajectory Diffusion for Object-Centric Manipulation.
International Conference on Robotics and Automation (ICRA), 2025.
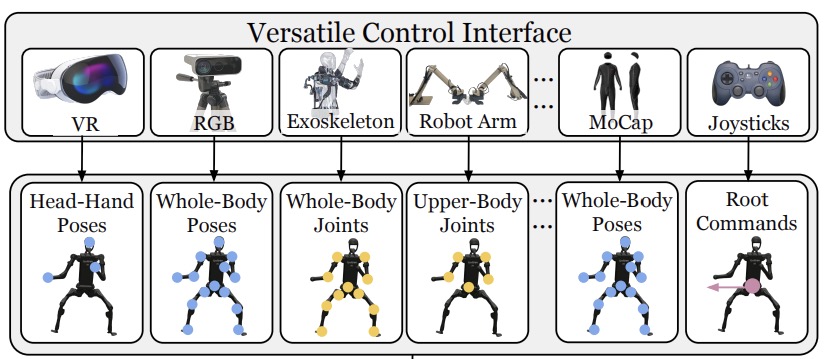
Tairan He, Wenli Xiao, Toru Lin, Zhengyi Luo, Zhenjia Xu, Zhenyu Jiang, Jan Kautz, Changliu Liu, Guanya Shi, Xiaolong Wang, Linxi Fan, Yuke Zhu.
Hover: Versatile neural whole-body controller for humanoid robots.
International Conference on Robotics and Automation (ICRA), 2025.
Nicklas Hansen, Jyothir S V, Vlad Sobal, Yann LeCun, Xiaolong Wang†, Hao Su†.
Hierarchical World Models as Visual Whole-Body Humanoid Controllers.
International Conference on Learning Representations (ICLR), 2025.

Mazeyu Ji*, Ri-Zhao Qiu*, Xueyan Zou, Xiaolong Wang.
GraspSplats: Efficient Manipulation with 3D Feature Splatting.
Conference on Robot Learning (CoRL), 2024.
Xialin He*, Chengjing Yuan*, Wenxuan Zhou, Ruihan Yang, David Held, Xiaolong Wang.
Visual Manipulation with Legs.
Conference on Robot Learning (CoRL), 2024.
Shiqi Yang, Minghuan Liu, Yuzhe Qin, Runyu Ding, Jialong Li, Xuxin Cheng, Ruihan Yang, Sha Yi, Xiaolong Wang.
ACE: A Cross-Platform Visual-Exoskeletons System for Low-Cost Dexterous Teleoperation.
Conference on Robot Learning (CoRL), 2024.
Jun Wang*, Ying Yuan*, Haichuan Che*, Haozhi Qi*, Yi Ma, Jitendra Malik, Xiaolong Wang.
Lessons from Learning to Spin “Pens”.
Conference on Robot Learning (CoRL), 2024.
Xuxin Cheng*, Jialong Li*, Shiqi Yang, Ge Yang, Xiaolong Wang.
Open-TeleVision: Teleoperation with Immersive Active Visual Feedback.
Conference on Robot Learning (CoRL), 2024.

Minghuan Liu*, Zixuan Chen*, Xuxin Cheng, Yandong Ji, Ruihan Yang, Xiaolong Wang.
Visual Whole-Body Control for Legged Loco-Manipulation.
Conference on Robot Learning (CoRL), 2024.
Oral Presentation
Ruihan Yang*, Zhuoqun Chen*, Jianhan Ma*, Chongyi Zheng*, Yiyu Chen, Quan Nguyen, Xiaolong Wang.
Generalized Animal Imitator: Agile Locomotion with Versatile Motion Prior.
Conference on Robot Learning (CoRL), 2024.
Workshop on Towards Reliable and Deployable Learning-Based Robotic Systems, CoRL 2023
Workshop Best Paper Award

Adrian Remonda, Nicklas Hansen, Ayoub Raji, Nicola Musiu, Marko Bertogna, Eduardo E. Veas, Xiaolong Wang.
A Simulation Benchmark for Autonomous Racing with Large-Scale Human Data.
Conference on Neural Information Processing Systems (NeurIPS), 2024.
Xuxin Cheng*, Yandong Ji*, Junming Chen, Ruihan Yang, Ge Yang, Xiaolong Wang.
Expressive Whole-Body Control for Humanoid Robots.
Robotics: Science and Systems (RSS), 2024.
Ruihan Yang, Yejin Kim, Aniruddha Kembhavi, Xiaolong Wang, Kiana Ehsani.
Harmonic Mobile Manipulation.
International Conference on Intelligent Robots and Systems (IROS), 2024.
Oral Presentation
Best Paper Award on Mobile Manipulation
Kang-Won Lee, Yuzhe Qin, Xiaolong Wang, Soo-Chul Lim.
DexTouch: Learning to Seek and Manipulate Objects with Tactile Dexterity.
Robotics and Automation Letters (RA-L), 2024.
Jun Wang*, Yuzhe Qin*, Kaiming Kuang, Yigit Korkmaz, Akhilan Gurumoorthy, Hao Su, Xiaolong Wang.
CyberDemo: Augmenting Simulated Human Demonstration for Real-World Dexterous Manipulation.
Conference on Computer Vision and Pattern Recognition (CVPR), 2024.
Ying Yuan*, Haichuan Che*, Yuzhe Qin*, Binghao Huang, Zhao-Heng Yin, Kang-Won Lee, Yi Wu, Soo-Chul Lim, Xiaolong Wang.
Robot Synesthesia: In-Hand Manipulation with Visuotactile Sensing.
International Conference on Robotics and Automation (ICRA), 2024.
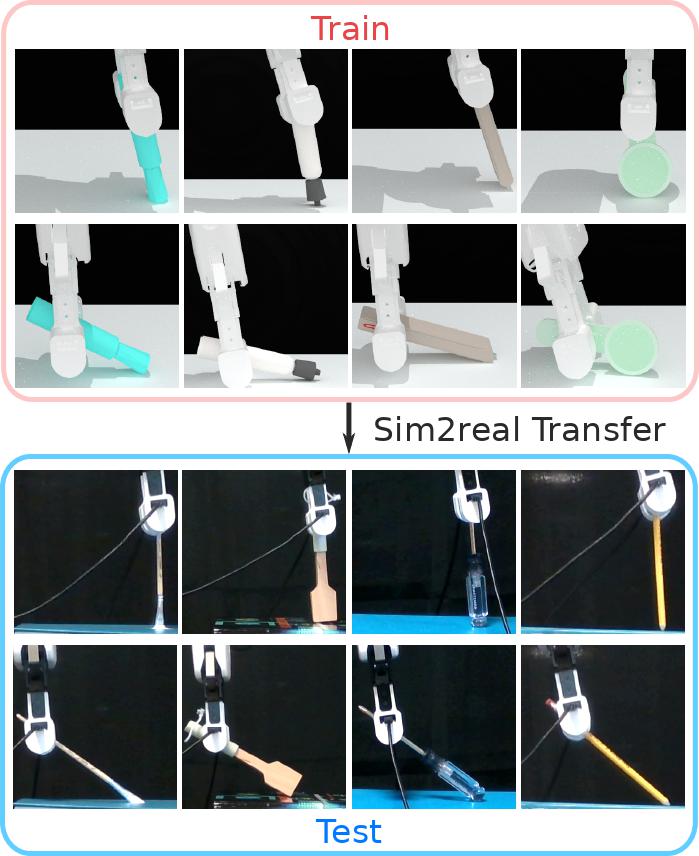
Entong Su, Chengzhe Jia, Yuzhe Qin, Wenxuan Zhou, Annabella Macaluso, Binghao Huang, Xiaolong Wang.
Sim2Real Manipulation on Unknown Objects with Tactile-based Reinforcement Learning.
International Conference on Robotics and Automation (ICRA), 2024.

Nicklas Hansen, Hao Su*, Xiaolong Wang*.
TD-MPC2: Scalable, Robust World Models for Continuous Control.
International Conference on Learning Representations (ICLR), 2024.
Spotlight
Lirui Wang, Yiyang Ling*, Zhecheng Yuan*, Mohit Shridhar, Chen Bao, Yuzhe Qin, Bailin Wang, Huazhe Xu, Xiaolong Wang.
GenSim: Generating Robotic Simulation Tasks via Large Language Models.
International Conference on Learning Representations (ICLR), 2024.
Spotlight
Workshop on Language Grounding and Robot Learning, CoRL 2023
Workshop Best Paper Award
Binghao Huang, Yuanpei Chen, Tianyu Wang, Yuzhe Qin, Yaodong Yang, Nikolay Atanasov, Xiaolong Wang.
Dynamic Handover: Throw and Catch with Bimanual Hands .
Conference on Robot Learning (CoRL), 2023.
Yanjie Ze*, Ge Yan*, Yueh-Hua Wu*, Annabella Macaluso, Yuying Ge, Jianglong Ye, Nicklas Hansen, Li Erran Li, Xiaolong Wang.
GNFactor: Multi-Task Real Robot Learning with Generalizable Neural Feature Fields.
Conference on Robot Learning (CoRL), 2023.
Oral Presentation
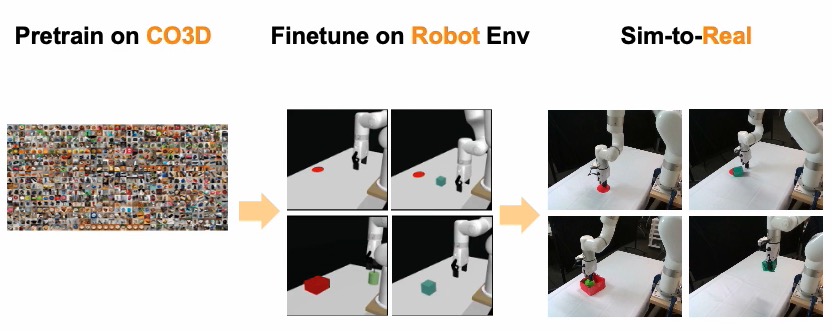
Yunhai Feng*, Nicklas Hansen*, Ziyan Xiong*, Chandramouli Rajagopalan, Xiaolong Wang.
Finetuning Offline World Models in the Real World.
Conference on Robot Learning (CoRL), 2023.
Oral Presentation
Yueh-Hua Wu, Xiaolong Wang*, Masashi Hamaya*.
Elastic Decision Transformer.
Conference on Neural Information Processing Systems (NeurIPS), 2023.
Zhao-Heng Yin*, Binghao Huang*, Yuzhe Qin, Qifeng Chen, Xiaolong Wang.
Rotating without Seeing: Towards In-hand Dexterity through Touch.
Robotics: Science and Systems (RSS), 2023.

Ruihan Yang, Ge Yang, Xiaolong Wang.
Neural Volumetric Memory for Visual Locomotion Control.
Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
Highlight
Yuying Ge, Annabella Macaluso, Li Erran Li, Ping Luo, Xiaolong Wang.
Policy Adaptation from Foundation Model Feedback.
Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
Jianglong Ye*, Jiashun Wang*, Binghao Huang, Yuzhe Qin, Xiaolong Wang.
Learning Continuous Grasping Function with a Dexterous Hand from Human Demonstrations.
Robotics and Automation Letters (RA-L), 2023.
International Conference on Intelligent Robots and Systems (IROS), 2023.
Yanjie Ze*, Nicklas Hansen*, Yinbo Chen, Mohit Jain, Xiaolong Wang.
Visual Reinforcement Learning with Self-Supervised 3D Representations.
Robotics and Automation Letters (RA-L), 2023.
International Conference on Intelligent Robots and Systems (IROS), 2023.
Nicklas Hansen, Yixin Lin, Hao Su, Xiaolong Wang, Vikash Kumar, Aravind Rajeswaran.
MoDem: Accelerating Visual Model-Based Reinforcement Learning with Demonstrations.
International Conference on Learning Representations (ICLR), 2023.
Yuzhe Qin*, Binghao Huang*, Zhao-Heng Yin, Hao Su, Xiaolong Wang.
DexPoint: Generalizable Point Cloud Reinforcement Learning for Sim-to-Real Dexterous Manipulation.
Conference on Robot Learning (CoRL), 2022.
Sateesh Kumar, Jonathan Zamora*, Nicklas Hansen*, Rishabh Jangir, Xiaolong Wang.
Graph Inverse Reinforcement Learning from Diverse Videos.
Conference on Robot Learning (CoRL), 2022 (Oral Presentation).
Yueh-Hua Wu*, Jiashun Wang*, Xiaolong Wang.
Learning Generalizable Dexterous Manipulation from Human Grasp Affordance.
Conference on Robot Learning (CoRL), 2022.
Yuzhe Qin*, Yueh-Hua Wu*, Shaowei Liu, Hanwen Jiang, Ruihan Yang, Yang Fu, Xiaolong Wang.
DexMV: Imitation Learning for Dexterous Manipulation from Human Videos.
European Conference on Computer Vision (ECCV), 2022.
Yuzhe Qin, Hao Su*, Xiaolong Wang*.
From One Hand to Multiple Hands: Imitation Learning for Dexterous Manipulation from Single-Camera Teleoperation.
Robotics and Automation Letters (RA-L), 2022.
International Conference on Intelligent Robots and Systems (IROS), 2022.

Chieko Sarah Imai*, Minghao Zhang*, Yuchen Zhang*, Marcin Kierebiński, Ruihan Yang, Yuzhe Qin, Xiaolong Wang.
Vision-Guided Quadrupedal Locomotion in the Wild with Multi-Modal Delay Randomization.
International Conference on Intelligent Robots and Systems (IROS), 2022.

Nicklas Hansen, Xiaolong Wang*, Hao Su*.
Temporal Difference Learning for Model Predictive Control.
International Conference on Machine Learning (ICML), 2022.
Rishabh Jangir*, Nicklas Hansen*, Sambaran Ghosal, Mohit Jain, Xiaolong Wang.
Look Closer: Bridging Egocentric and Third-Person Views with Transformers for Robotic Manipulation.
Robotics and Automation Letters (RA-L), 2022.
International Conference on Robotics and Automation (ICRA), 2022.

Ruihan Yang*, Minghao Zhang*, Nicklas Hansen, Huazhe Xu, Xiaolong Wang.
Learning Vision-Guided Quadrupedal Locomotion End-to-End with Cross-Modal Transformers.
International Conference on Learning Representations (ICLR), 2022 (Spotlight Presentation).
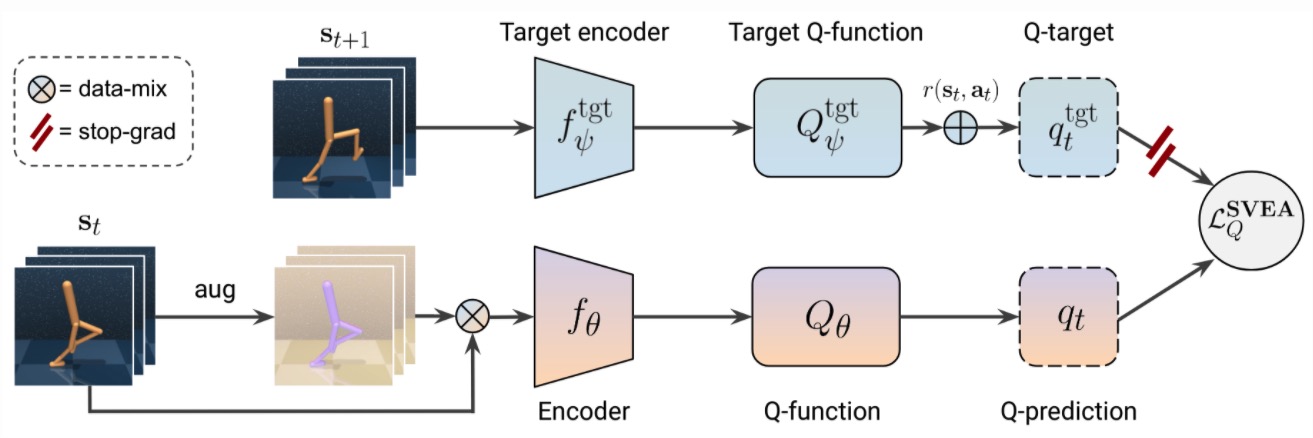
Nicklas Hansen, Hao Su, Xiaolong Wang.
Stabilizing Deep Q-Learning with ConvNets and Vision Transformers under Data Augmentation.
Conference on Neural Information Processing Systems (NeurIPS), 2021.
Minghao Zhang*, Pingcheng Jian*, Yi Wu, Huazhe Xu, Xiaolong Wang.
DAIR: Disentangled Attention Intrinsic Regularization for Safe and Efficient Bimanual Manipulation.
arXiv, 2021.
Ilija Radosavovic, Xiaolong Wang, Lerrel Pinto, Jitendra Malik.
State-Only Imitation Learning for Dexterous Manipulation.
International Conference on Intelligent Robots and Systems (IROS), 2021.
Nicklas Hansen, Xiaolong Wang.
Generalization in Reinforcement Learning by Soft Data Augmentation.
International Conference on Robotics and Automation (ICRA), 2021.

Qiang Zhang, Tete Xiao, Alexei A. Efros, Lerrel Pinto, Xiaolong Wang.
Learning Cross-domain Correspondence for Control with Dynamics Cycle-consistency.
International Conference on Learning Representations (ICLR), 2021 (Oral Presentation).
Nicklas Hansen, Rishabh Jangir, Yu Sun, Guillem Alenyà, Pieter Abbeel, Alexei A. Efros, Lerrel Pinto, Xiaolong Wang.
Self-Supervised Policy Adaptation during Deployment.
International Conference on Learning Representations (ICLR), 2021 (Spotlight Presentation).
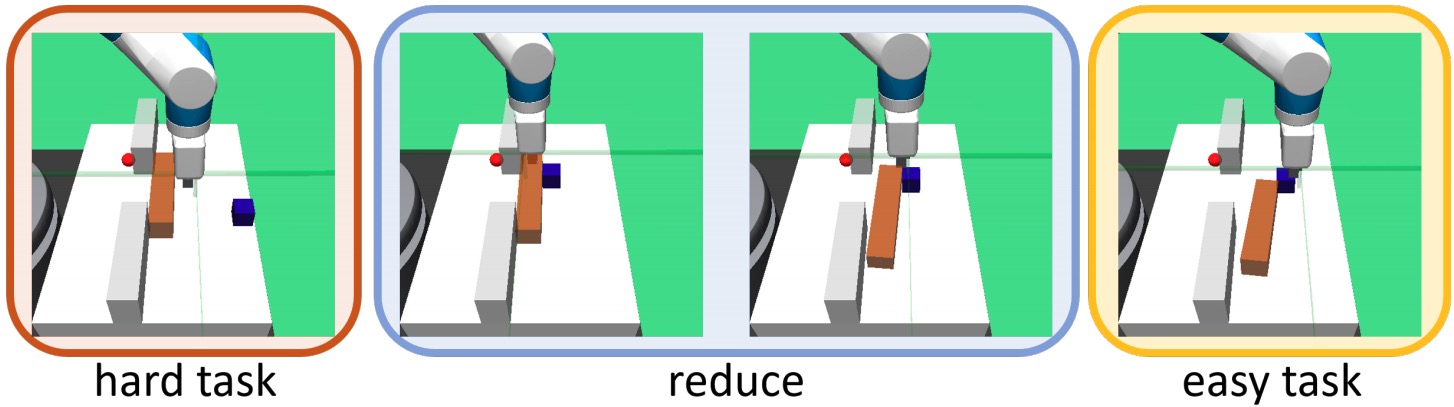
Yunfei Li, Huazhe Xu, Yilin Wu, Xiaolong Wang, Yi Wu.
Solving Compositional Reinforcement Learning Problems via Task Reduction.
International Conference on Learning Representations (ICLR), 2021.
Zhenggang Tang, Chao Yu, Boyuan Chen, Huazhe Xu, Xiaolong Wang, Fei Fang, Simon Shaolei Du, Yu Wang, Yi Wu.
Discovering Diverse Multi-Agent Strategic Behavior via Reward Randomization.
International Conference on Learning Representations (ICLR), 2021.

Tianjun Zhang, Huazhe Xu, Xiaolong Wang, Yi Wu, Kurt Keutzer, Joseph E. Gonzalez, Yuandong Tian.
Multi-Agent Collaboration via Reward Attribution Decomposition.
arXiv, 2020.
Ruihan Yang, Huazhe Xu, Yi Wu, Xiaolong Wang.
Multi-Task Reinforcement Learning with Soft Modularization.
Conference on Neural Information Processing Systems (NeurIPS), 2020.
Qian Long*, Zihan Zhou*, Abhinav Gupta, Fei Fang, Yi Wu†, Xiaolong Wang†.
Evolutionary Population Curriculum for Scaling Multi-Agent Reinforcement Learning.
International Conference on Learning Representations (ICLR), 2020.